|
Jianshu Hu I'm currently a researcher at Shanghai Institute for Physical Artificial Intelligence and Robotics (SIPAIR). I graduated from SJTU Global College, working on sample-efficient and generalizable robot learning, advised by Prof. Yutong Ban and Prof. Paul Weng. Before my PhD study, I finished my master degree in Upenn GRASP, where I had the honor of being advised by Prof. Michael Posa. |

|
ResearchI'm interested in general robot learning and currently focusing on dexterous robot manipulation. My previous research focuses on improving sample-efficiency and generalization ability of robot learning algorithms by exploiting data augmentation, leveraging pre-trained models, and learning a dynamics model/world model. Some papers are highlighted. I am open to research collaborations in robot learning and robot manipulation. There are a few positions available for motivated interns in SIPAIR. Please feel free to reach out by email. |
|
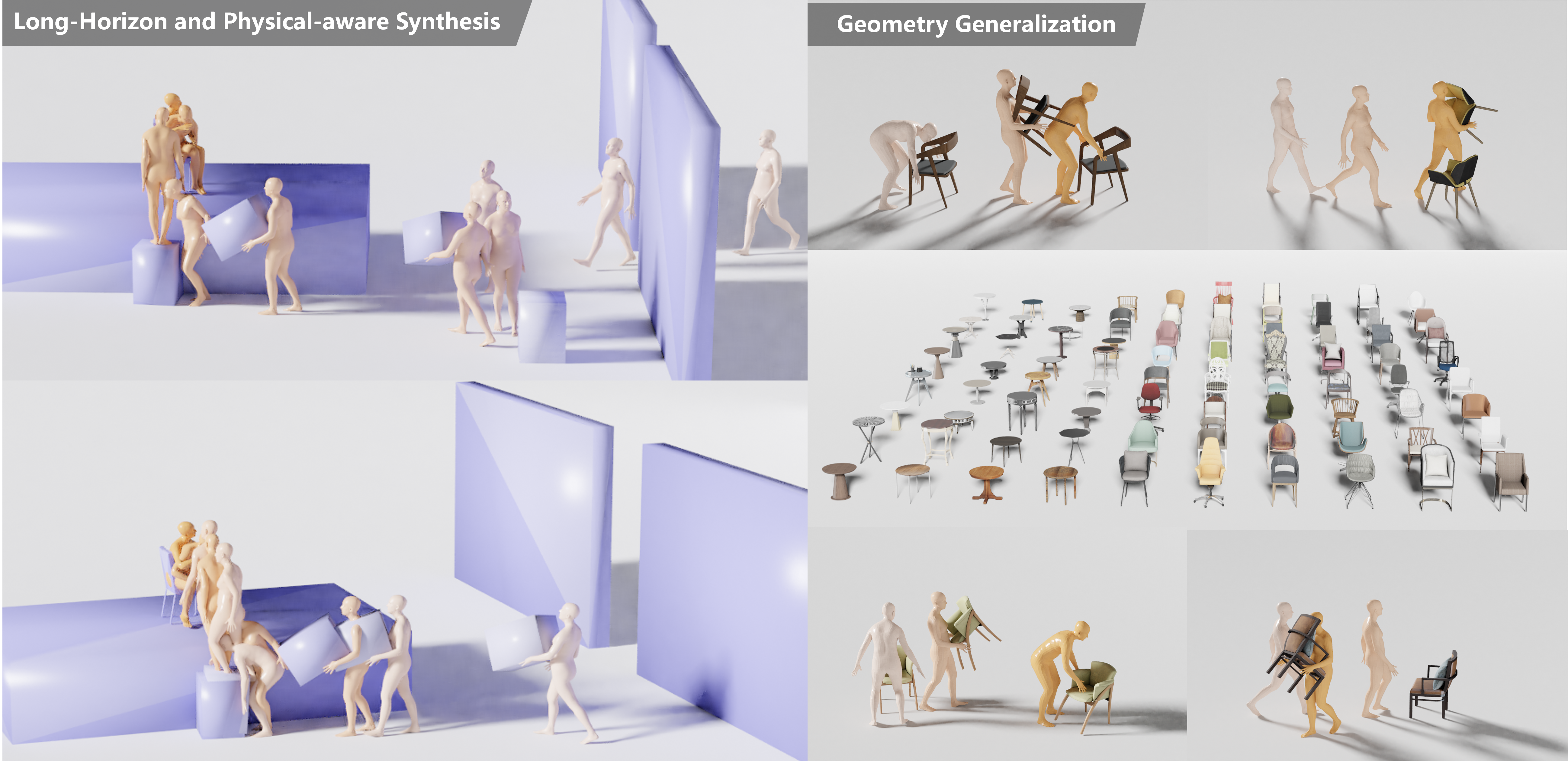
Policy-as-Data: Learning Generalizable HOI Diffusion Models from Simulated Physics
Shujia Li, Jianshu Hu, Haiyu Zhang, Yunpeng Jiang, Haoyuan Jin, Xinyuan Chen, Yaohui Wang, Yutong Ban Under Review arXiv, code We propose Policy-as-Data, a scalable framework that uses reinforcement-learning policies in a physics simulator to generate task-oriented training data for generalizable human-object interaction synthesis. A coarse-to-fine retargeting process enables long-horizon generation with improved generalization to unseen objects, dynamic diversity, and physical plausibility. |
|
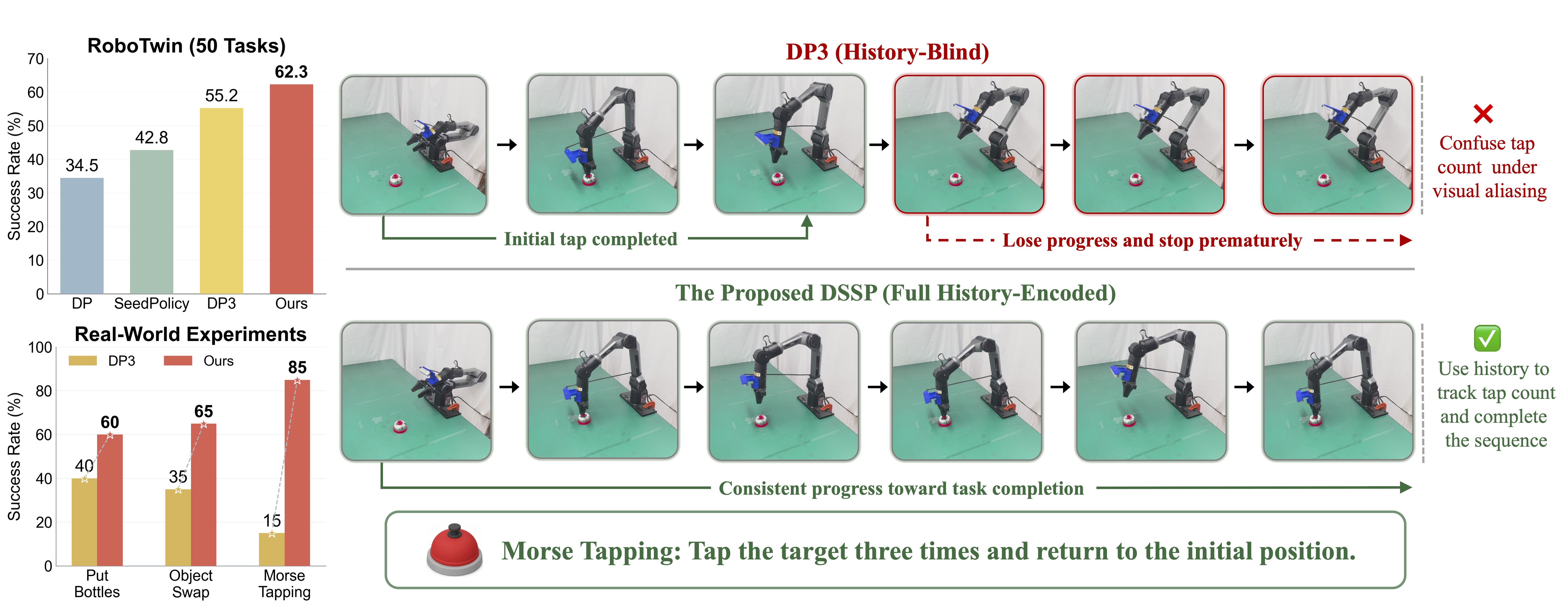
DSSP: Diffusion State Space Policy with Full-History Encoding
Zhiyuan Guan, Jianshu Hu, Han Fang, Yunpeng Jiang, Yize Huang, Shujia Li, Xiao Li, Yutong Ban† Under review arXiv In this paper, we introduce DSSP, a history-conditioned Diffusion State Space Policy that enables efficient, full-history conditioning for robot manipulation. Leveraging the continuous sequence modeling properties of State Space Models (SSMs), our history encoder effectively compresses the entire observation stream into a compact context representation. |
|
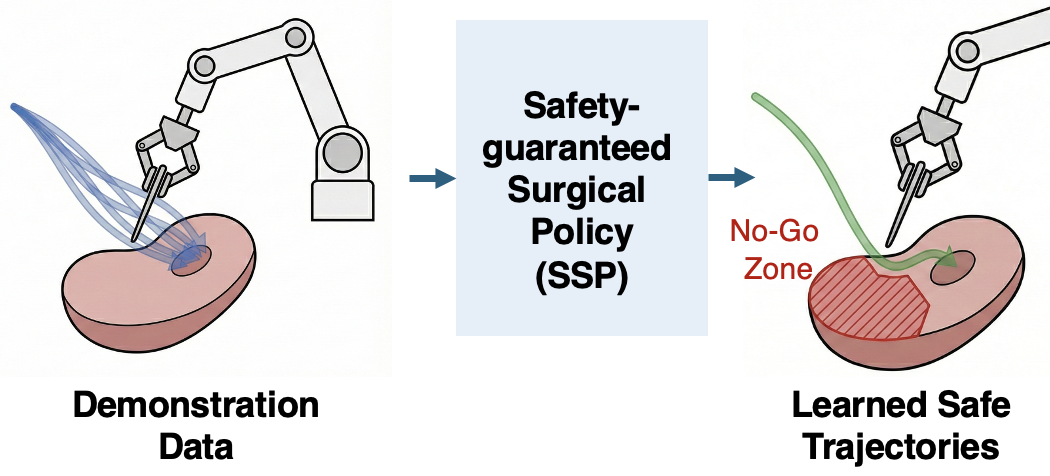
SSP: Safety-guaranteed Surgical Policy via Joint Optimization of Behavioral and Spatial Constraints
Jianshu Hu, Zhiyuan Guan, Lei Song, Kantaphat Leelakunwet, Hesheng Wang, Wei Xiao, Qi Dou, Yutong Ban† Under review arXiv, website In this paper, we propose the Safety-guaranteed Surgical Policy (SSP) framework to bridge the gap between data-driven generality and formal safety. Validation in both the SurRoL simulation and da Vinci Research Kit (dVRK) demonstrates that our method achieves a near-zero constraint violation rate while maintaining high task success rates compared to unconstrained baselines. |
|
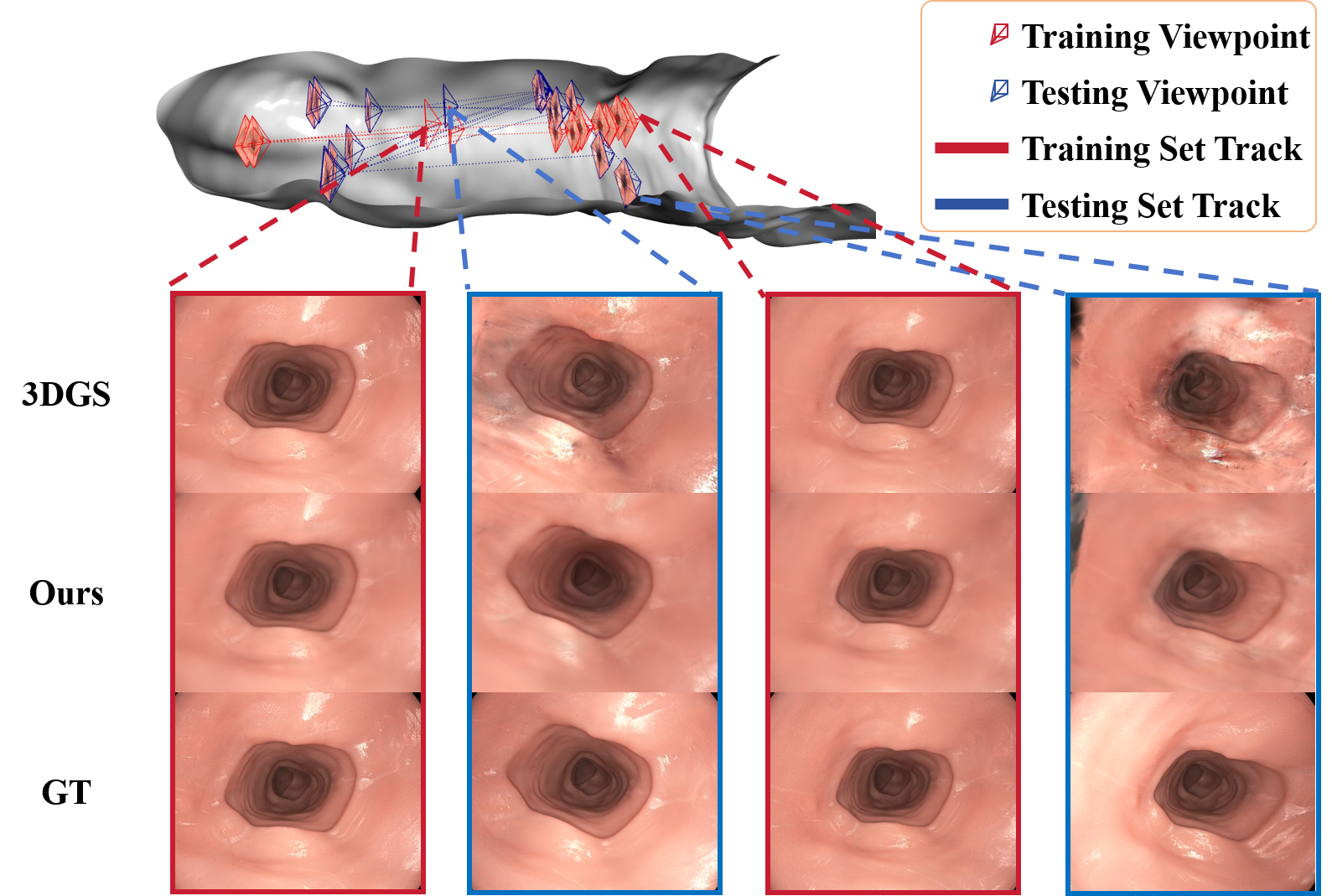
ExtraGS: Enhancing Endoscopic View Extrapolation via Diffusion-Guided 3D Gaussian Splatting
Cheng-Tai Hsieh, Jiwei Shan, Han Fang, Jianshu Hu, Tao Ni, Lijun Han, Yutong Ban, Shing Shin Cheng, Hesheng Wang IROS 2026 arXiv We propose ExtraGS, a diffusion-guided 3D Gaussian Splatting framework for endoscopic view extrapolation. ExtraGS uses uncertainty-guided virtual camera sampling and confidence-weighted fine-tuning to reduce extrapolation artifacts and achieve state-of-the-art novel view synthesis performance across multiple public endoscopic datasets. |
|
Generalizable Coarse-to-fine Robot Manipulation via Language-aligned 3D Keypoints
Jianshu Hu, Lidi Wang, Shujia Li, Yunpeng Jiang, Xiao Li, Paul Weng†, Yutong Ban† ICLR 2026 arXiv, website, code We introduce a novel coarse-to-fine 3D manipulation policy which outperforms the state-of-the-art method, achieving a 12% higher average success rate with only 1/5 of the training trajectories. In real-world experiments, our method demonstrate strong generalization ability to novel tasks and object variations with only 10 demonstrations per task. |
|
Time Reversal Symmetry for Efficient Robotic Manipulations in Deep Reinforcement Learning
Yunpeng Jiang, Jianshu Hu, Paul Weng†, Yutong Ban† NeurIPS 2025 arXiv, website, code We propose Time Reversal symmetry enhanced Deep Reinforcement Learning (TR-DRL), a framework that combines trajectory reversal augmentation and time reversal guided reward shaping to efficiently solve temporally symmetric tasks. |
|
Diffusion Stabilizer Policy for Automated Surgical Robot Manipulations
Chonlam Ho* Jianshu Hu*, Lei Song, Hesheng Wang, Qi Dou, Yutong Ban ICRA 2026 arXiv Aiming to extend the successes in solving manipulation tasks to the domain of surgical robotics, we propose a diffusion-based policy learning framework, called Diffusion Stabilizer Policy, which enables training with imperfect or even failed trajectories. |
|
State-Novelty Guided Action Persistence in Deep Reinforcement Learning
Jianshu Hu, Paul Weng†, Yutong Ban† Machine Learning Journal arXiv In this paper, we propose a novel method to dynamically adjust the action persistence based on the current exploration status of the state space. |
|
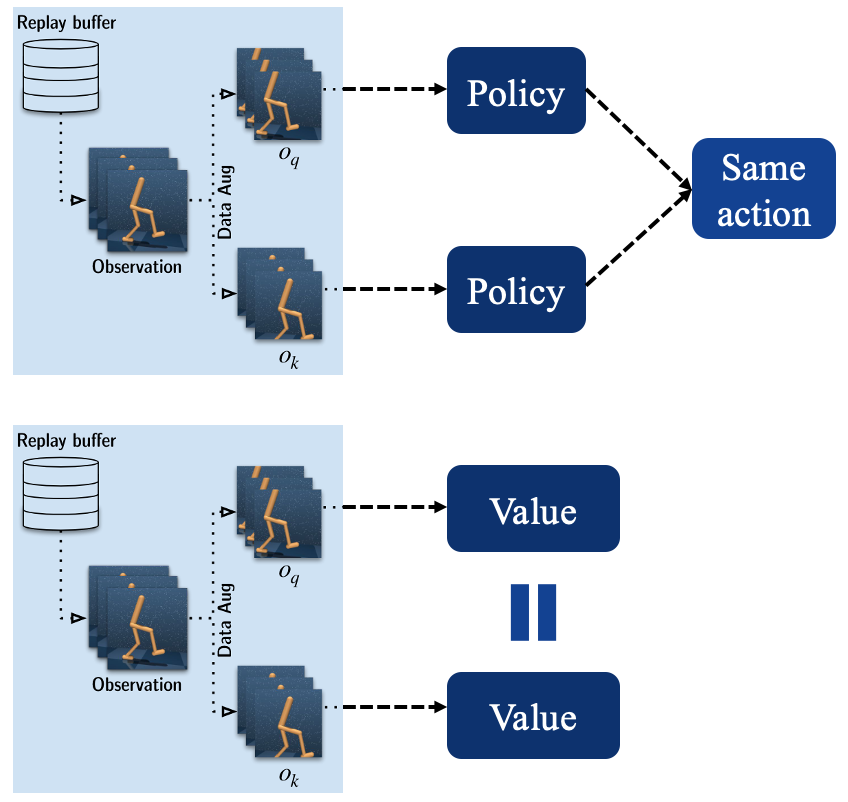
Revisiting Data Augmentation in Deep Reinforcement Learning
Jianshu Hu, Yunpeng Jiang, Paul Weng ICLR, 2024 arXiv, code We make recommendations on how to exploit data augmentation in image-based DRL in a more principled way. And we include a novel regularization term called tangent prop in RL training. |
|
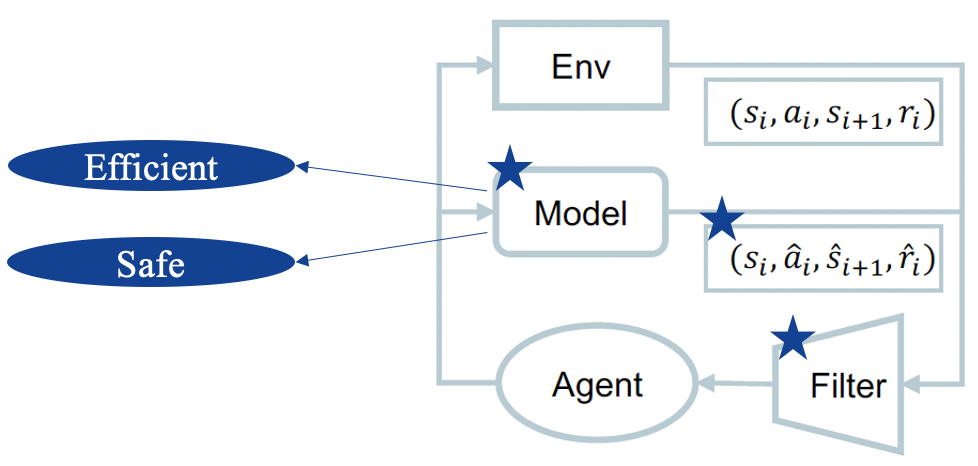
Solving Complex Manipulation Tasks with Model-Assisted Model-Free Reinforcement Learning
Jianshu Hu, Paul Weng CoRL, 2022 paper link A novel deep reinforcement learning approach for improving the sample efficiency of a model-free actor-critic method by using a learned model to encourage exploration. |
|
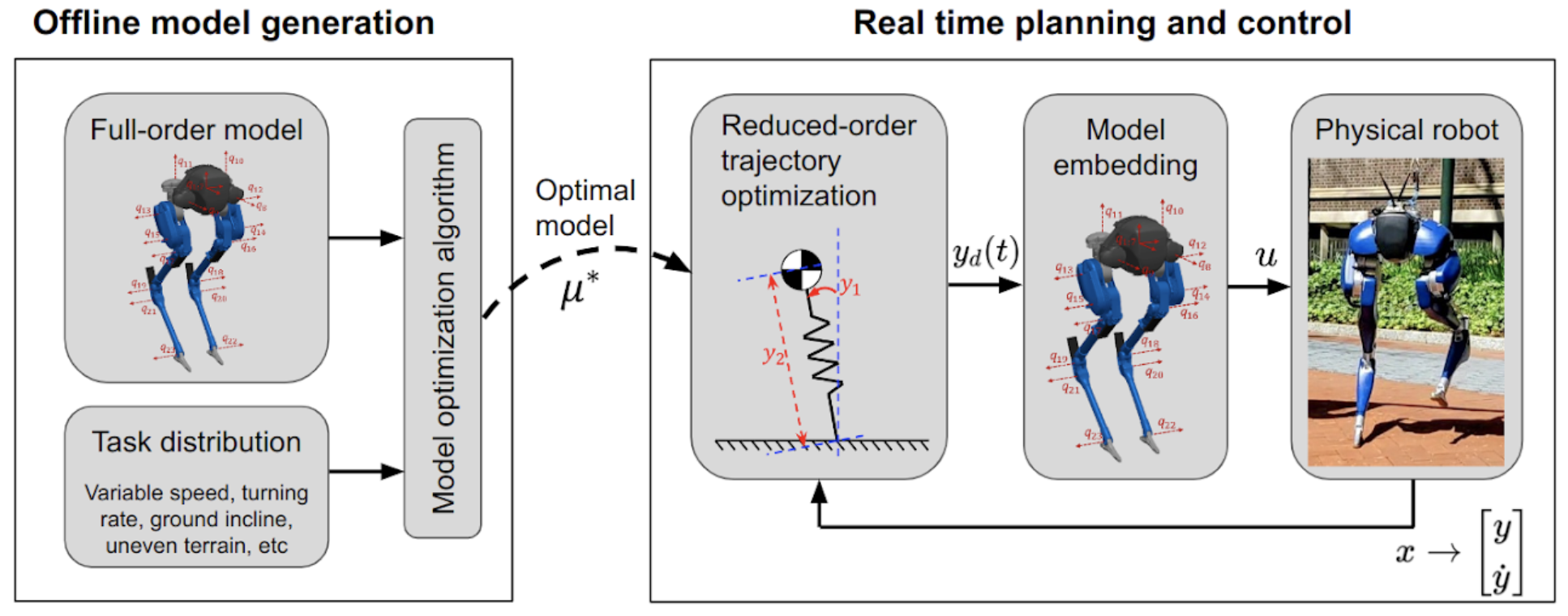
Beyond Inverted Pendulums: Task-Optimal Simple Models of Legged Locomotion
Yu-Ming Chen, Jianshu Hu, Michael Posa T-RO arXiv We propose a model optimization algorithm that automatically synthesizes reduced-order models. |
Miscellanea |
 |
Conference Reviewer: ICLR, NeurIPS, MICCAI, IROS
Journal Reviewer: RA-L, TNNLS |
|
This website is build on this source code. Thanks to Jon Barron. |